| |
|
Red
Rover Goes To Mars
The Red Rover Project is a joint initiative between the Planetary
Society and the LEGO® Company, aimed at students and
home users alike, it is designed to give everyone the experience
of
exploring
an unknown world through the eyes of a robotic Rover. The project
recreates many of the functional and operational conditions which
face Exploration Rovers (and their designers, engineers, and operators)
when exploring another planet.
Through the use of LEGO® Mindstorms
components, Technic bricks and accessories, (even a LEGO® Studio
Camera), your goal is to build a Rover which meets specific
mission and operational objectives. These can be as simple
as navigating around an obstacle, to fulfilling a complex
set of related tasks. Your operational terrain is a simulated
Mars environment, complete with site specific geographic
features, Your aim is to explore and discover as much as
you can about this alien environment.
|
| |
|

|
| |
|
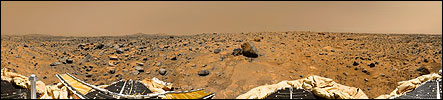
The "Mars
Station Gusev Crater," hosted by the Centro de Astrobiología
(CAB) in Madrid, Spain. was constructed to simulate the appearance
of one of the two Mars Exploration Rover landing sites, Gusev
Crater. The student is controlling the rover locally through
a computer, but this Mars Stations also allow visitors to
control the rover via the Internet. Learn more about the
diorama here.
|
| |
|
 Special
software enables you to control and navigate your Exploration
Rover. Using A LEGO® Studio Camera as your Rover’s “eyes”,
all control and navigation is performed remotely through
a screen based interface. The software allows the user to
drive the Rover, with an image panel showing the Rover’s
perspective of its environment - you to ‘see’ what
the Rover sees through its camera. You can control external
sensors and motors to perform a variety of tasks: Drill holes,
pick up objects, take sensor readings, etc.. . Rover commands
are transmitted from the Computer (via Infrared transmitter)
to a LEGO® RCX Brick which is in tern linked to the Rover. Special
software enables you to control and navigate your Exploration
Rover. Using A LEGO® Studio Camera as your Rover’s “eyes”,
all control and navigation is performed remotely through
a screen based interface. The software allows the user to
drive the Rover, with an image panel showing the Rover’s
perspective of its environment - you to ‘see’ what
the Rover sees through its camera. You can control external
sensors and motors to perform a variety of tasks: Drill holes,
pick up objects, take sensor readings, etc.. . Rover commands
are transmitted from the Computer (via Infrared transmitter)
to a LEGO® RCX Brick which is in tern linked to the Rover.
This concept is very similar to the way real exploration Rovers
are controlled, albeit they use High frequency UHF for communication,
and have many sensors to choose from when viewing surrounding
terrain, the idea of remote operation is the same. Learn more
about Rover control here.
|
| |
|
Rovers
designed for the Red Rover Project fall into one of three categories:
|
| |
|
 |
 |
|
 Marie
Curie Marie
Curie
Marie Curie Class Rovers are small, tethered rovers that
carry a camera (either LEGO® Vision Command or LEGO® Studios
Camera or Logitech QuickCam) and have no other sensors. They do
not carry the RCX; the RCX that controls the Rover sits next to
the computer, and the Rover is tethered to the computer using long
wires. (Why? This allows the RCX to receive power from a power
supply instead of eating batteries, and the camera tethers the
rover to the computer anyway.)
|
| |
|
|
|
|
 Rocky Rocky
Rocky Class Rovers are similar to Marie Curie class rovers: They
are small, tethered rovers that carry a camera but not the
RCX. They are different from Marie Curie rovers in that they
also carry an extra motorized device (for example, a robotic
arm, moveable camera mount, collision sensor, or a Core
Drill) that can be operated through programs stored on the
RCX.
|
| |
|
|
|
|
 Athena Athena
Athena Class Rovers are completely wireless rovers, carrying a
wireless (X10 or other) camera and the RCX. The Infrared transmitting
tower (connected to the computer) is mounted over the operating
environment, so the rover is not tethered to the computer.
Like the Rocky class of rovers, Athena class rovers may also,
but are not required to, carry an additional motorized device.
|
| |
|
Check
out more Rover designs for each of these categoties here.
|
| |
|
|
| |
|
Operating
environment
The Red Rover project calls for a simulated Martian environment
in which your LEGO® Rover explores. Typically these environments
(dioramas) represent a specific geographic location of Mars, but
for those of you reading this at home, a few well placed magazines,
rumpled hallway rug, and the odd shoe also make for a challenging
exploration environment.
 The
Red Rover project is aimed a schools and educational institutions
around the world, and as such, many operational dioramas
have been constructed. Each of these ‘Mars Stations’ consists
of a diorama representing an area of Mars, a LEGO® Rover
(equipped with a Web camera), and special control software,
which allows you to log on and remotely drive and control
the Rover over the internet. At some Mars Stations, you
will be offered challenges: discovering certain rocks,
retrieving valuable samples, or safely traversing a rock-strewn
plain– Pretty cool. Visit the on-line Mars Stations here. The
Red Rover project is aimed a schools and educational institutions
around the world, and as such, many operational dioramas
have been constructed. Each of these ‘Mars Stations’ consists
of a diorama representing an area of Mars, a LEGO® Rover
(equipped with a Web camera), and special control software,
which allows you to log on and remotely drive and control
the Rover over the internet. At some Mars Stations, you
will be offered challenges: discovering certain rocks,
retrieving valuable samples, or safely traversing a rock-strewn
plain– Pretty cool. Visit the on-line Mars Stations here.
|
| |
|
|
| |
|
The
Red Rover Project is an exciting way to learn about the
unique challenges in designing and operating Exploration
Rovers. The Mars Stations allow you to explore a simulated
Mars world remotely, running the Rover around to see what’s
just beyond the field of view, or what’s behind that
rock. What is most evident though is that controlling the
Rover remotely, over the internet, (or through space for
that matter), is not as easy as driving a remote controlled
car that you can see.
The Planetary Society is actively involved with ongoing support
for the Mars
Exploration Program with initiatives such as the Astrobot
Diaries, and the Student
Astronauts, programs. The Society is a nonprofit, nongovernmental
organization, funded by dues and donations from individuals
around the world. Learn more about the Planetary Society here.
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
|
|
|
|
|
 |
| RED
ROVER, RED ROVER |
|
|
The Planetary Society's Red Rover Goes to Mars Project
With the Red Rover Goes to Mars project, The Planetary
Society and the LEGO®
Company have partnered to provide hands-on opportunities
for students around the world to participate directly
in real missions to Mars.
In 2001, a team of students traveled to Malin
Space Science Systems to operate the
camera aboard the Mars Global Surveyor mission, currently
in orbit around Mars. A year later, a different group
of students worked at the Jet Propulsion
Laboratory learning to operate the FIDO rover, a prototype
rover designed to support upcoming NASA Mars missions.
And, in early 2004, a team of Red Rover Goes to Mars
Student Astronauts will work inside mission operations
at the Jet Propulsion Laboratory while the Mars Exploration
Rovers explore
the Red Planet.

Learn more here about
student Astronauts. Meet the winners and finalists here who
are
off to JPL early next year.
|
|
|
 |
|
 |
|
| |
| |
|
| ROVER
CONTROL SOFTWARE |
|
|

To control your Rover through a Computer (or over the
internet) you will need some special software. Such
software is usually free for download for use at home,
Software included with the Planetary Society’s Red
Rover, Red Rover classroom pack, is free
for trial/home use, while you have to buy the
LEGO® Exploration
Mars set before you can use its' software.
Both of these packages operate a single Rover
through a screen based interface. Typically
the Rover is close by (Maybe in the next Room),
and the Infrared transmitter is connected directly
to the computer.

However there are other software packages which
enable you to remotely control Rovers over the
internet, where the Rover might be in a different
building, or even country. The Planetary Society’s
on-line Mars Stations use this type of software.
Some cleaver people have written their own software
which enables you control your Rover over the
internet.
Web Enabled Rover
Controllers
Web
Brick
WebRCX
IRCXVC
WebCam Servers/Vision
APIs
VisionGS
Webcam32
LeJOS
Vision System
|
|
|
|
|
|
|
| |
 |
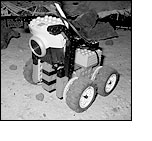
The
Modular Ordinance Platform (M.O.P) is a general purpose
Rover chassis which is capable of supporting many different
operational configurations and mission requirements.
The Marie Curie Configuration of the M.O.P is a small
tethered Rover with all power and data being supplied
by long (120cm) electric cables connected to an external
LEGO® RCX.
Learn more about the Marie Curie M.O.P here
|
|
| |
 |
Ever wondered how a
Rover works? Check out Rover TechNotes to discover
how a Rover operates and explores on distant worlds.
Learn more about Rovers here
|
|
| |
 |
The Planetary Society was founded in 1980 by Carl Sagan,
Bruce Murray, and Louis Friedman to encourage the exploration
of our solar system and the search for extraterrestrial
life.
The Society is a nonprofit, nongovernmental organization,
funded by dues and donations from individuals around
the world. With more than 100,000 members from over
140 countries, we are the largest space interest
group on Earth. Membership is open to all people
interested in our mission.
Learn more about the Planetary Society here
|
 |
|
|






