| |
 |
| |
|
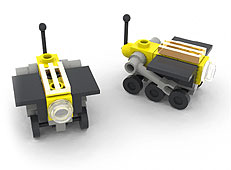
 M.O.P
Marie Curie M.O.P
Marie Curie
The Modular Ordinance Platform (M.O.P)
is a general purpose Rover chassis which is capable of supporting
many different operational
configurations and mission requirements. The Marie
Curie Configuration of the
M.O.P is a small tethered Rover with all power and data being supplied
by long (120cm) electric cables connected to an external LEGO® RCX.
|
|
|
| |
|
| |
|
 YogiCub
Rover YogiCub
Rover
YogiCub is the first installment
in an ongoing study of NASA Rover technology. The YogiCub
Rover is a simple design, focusing on drive and steering
systems only. It is powered by an on-board LEGO® Mindstorms
RXC 2.0. YogiCub has four independently powered wheels, which
are all capable of pivoting to provide steering and drive.
Learn
more about YogiCub.
|
|
|
| |
|
| |
|
 Cyclo Cyclo
The Cyclo Rover is a fast autonomous Rover used for light construction,
and general maintenance duties. It has a single grabber used for
manipulation tasks and a range of 250 km. It is powered by an internal
rechargeable hydrogen fuel cell.
|
|
|
| |
|
| |
|
 Harvester Harvester
The Harvester Rover is used in Mars
Habitat’s where large
scale biospheres and arboretum’s are present. It has a number
of built in routines which allow it to perform daily hortirical
maintenance and tendering. The Harvester Rover can also control
up to 4 mobile slave units for autonomous collection and waste
disposal.
|
|
|
| |
|
| |
|
 Luna
Rover Luna
Rover
The
Lunar Roving Vehicle (LRV) was an electric vehicle
designed to operate in the low-gravity vacuum of the Moon. The "Moon
Buggy" was designed to fold up inside the tight
confines of the Lunar Module and, was able to travel 50 km across
the Moon's cratered terrain and carry more than its own weight
in moon rocks and passengers.
|
|
|
| |
|
| |
|
 Blue
Rover Blue
Rover
The
'Blue Rover' was the first 3-Segment Rover designed by NASA.Its
design is based off a '3-Segment' chassis which enables it to traverse
uneven terrain while having all wheels wheels in contact with the
ground.
|
|
|
| |
|
| |
|
 Robbie
Rover Robbie
Rover
Robbie is a remote controlled Rover that
has a single grabbing arm used to pickup objects. Its design is based
off a '3-Segment' chassis which enables it to traverse uneven terrain
while having all wheels wheels in contact with the ground.
|
|
|
| |
|
| |
|
 Sojourner
Rover Sojourner
Rover
Sojourner traveled to Mars aboard
the Mars Pathfinder Mission
in 1997. Sojourner’s function was to, explore the terrain
of Mars within sight of the Pathfinder Lander, conducting
atmospheric, geographic, and scientific experiments.
|
|
|
| |
|
| |
|
 Mars
Exploration
Rover Mars
Exploration
Rover
The Mars Exploration Rover (MER) is a robotic geologist, equipped
with a robot arm, a drill, three spectrometers and four pairs
of
cameras, which allows it to have a human-like, 3D view of surrounding
terrain.
|
|
|
| |
|
| |
|
 MER
II MER
II
The 'next generation' of Mars Rover.
Able to travel as far as 250 meters in one day to act as Mars scientists'
eyes and
hands,
exploring
an environment where humans can't yet go.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|



