|
 The
third area for improvement focuses on what wasn’t implemented,
as apposed to what was. It stems from my (in hindsight) inexperienced
assumption that the duration required to turn the Rover through
a prescribed angle (say 90º) would be consistent – As it
turned out, it wasn’t! The
third area for improvement focuses on what wasn’t implemented,
as apposed to what was. It stems from my (in hindsight) inexperienced
assumption that the duration required to turn the Rover through
a prescribed angle (say 90º) would be consistent – As it
turned out, it wasn’t!
When turning YogiCub’s wheels always rotate through 45º. Having
reached this, individual wheels are driven to turn the Rover through
the desired angle of turn (whether 90º, 180º, 360º, or whatever).
My downfall was having no way to accurately measure this. I assumed
it could be measured as a time based event rather than a controlled
event.
YogiCub’s turning relied on a calculation involving Rover
dimension, wheel circumference, motor speed, and time. Assuming
all of these factors are consistent during operation no problem.
Rover dimension and wheel circumference don’t change. Time
for the most part is relative, and we perceive it as being consistent.
This leaves motor speed as the culprit. It does change quite considerably
during operation and this renders any time-based calculation useless.
As it turns out, (a no-brainer in retrospect) motor speed varies
with available battery power and wheel resistance. The less battery
power the slower the wheel will turn. Therefore less distance traveled
during a specified time period. The more resistance applied to the
wheel, the more power required to turn it, slightly reducing the
motor’s speed. – I can’t win.
Conclusion
Build a Rotation sensor into a Wheel assembly to monitor actual
wheel revolutions as they happen (as apposed to predicted). Even
better, have two (mounted to wheel assemblies on either side of
the rover) and have the RCX average out the two readings for more
accurate turning. This will enable consistent interpretation of
a calculation based on Rover dimension and wheel circumference only.
We don’t need to worry about motor gearing and speed –
simple.
|





 Overall
YogiCub performed as expected and is a solid Rover. While
somewhat simple in its execution it has laid the foundation
for subsequent LEGO® Rovers.
Overall
YogiCub performed as expected and is a solid Rover. While
somewhat simple in its execution it has laid the foundation
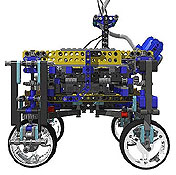
for subsequent LEGO® Rovers. Firstly,
the steering drive train had a 56:1 gearing reduction and this
generated
more than enough force to turn all four wheel assemblies. The weakness
lie in the Crown gear (and its mounting) used to drive and pivot
the turntable onto which the the wheel assemblies were attached.
The Crown gear is made of a slightly flexible ABS as opposed to
the ridged ABS found in other gears. Because of its mounting, when
being driven it exhibited considerable flex and occasionally slipped
a tooth (the dreaded click) over the outer ring of the turntable.
Once this happened, it was all over. One, or sometimes two wheels
were out of register with the others and YogiCub failed to go any
further.
Firstly,
the steering drive train had a 56:1 gearing reduction and this
generated
more than enough force to turn all four wheel assemblies. The weakness
lie in the Crown gear (and its mounting) used to drive and pivot
the turntable onto which the the wheel assemblies were attached.
The Crown gear is made of a slightly flexible ABS as opposed to
the ridged ABS found in other gears. Because of its mounting, when
being driven it exhibited considerable flex and occasionally slipped
a tooth (the dreaded click) over the outer ring of the turntable.
Once this happened, it was all over. One, or sometimes two wheels
were out of register with the others and YogiCub failed to go any
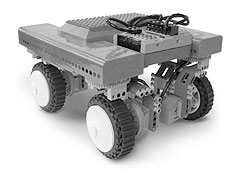
further. A
second, more intermittent, problem was the loss of a wheel
after performing a long sequence of steering maneuvers. The
successive lateral loading on the wheel caused by repetitive
turning and forward movement prompts the fastening pins to
pop out of their mounts within the wheel. Once one pin is
out, it is only a mater of time before the others follow suit
- Quite funny to watch a wheel with independent thought going
it alone.
A
second, more intermittent, problem was the loss of a wheel
after performing a long sequence of steering maneuvers. The
successive lateral loading on the wheel caused by repetitive
turning and forward movement prompts the fastening pins to
pop out of their mounts within the wheel. Once one pin is
out, it is only a mater of time before the others follow suit
- Quite funny to watch a wheel with independent thought going
it alone.