|
 Along with the physical Rover design and implementation, control
software was developed which allows you to operate and monitor
the M.O.P Rover remotely via PC. The Journeyman control interface
provides the user with real-time visual feedback of operational
conditions, Rover Status, and movement control. The Journeyman
Interface allows the user to control and collect data from the
onboard Rover systems, sensors and manipulators. Along with the physical Rover design and implementation, control
software was developed which allows you to operate and monitor
the M.O.P Rover remotely via PC. The Journeyman control interface
provides the user with real-time visual feedback of operational
conditions, Rover Status, and movement control. The Journeyman
Interface allows the user to control and collect data from the
onboard Rover systems, sensors and manipulators.
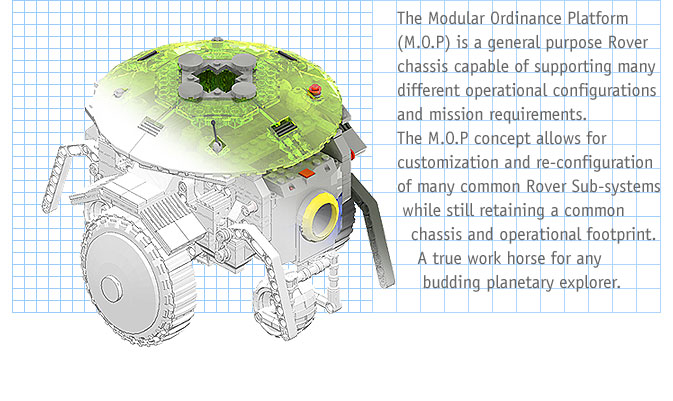
Depending on the physical and control software configuration,
the M.O.P rover can be used for exploration missions; construction
tasks, and even partakes in a quick game of soccer (during lunch
of course). Try doing all of that with a single set of wheels – let’s
find out how the M.O.P does it!
|