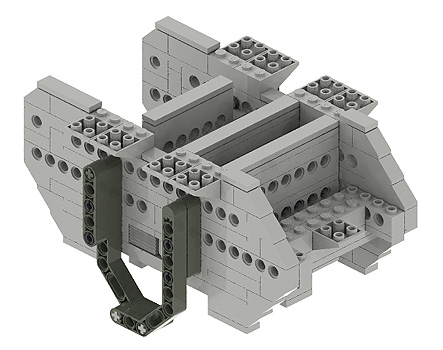
Regardless
of mission specific configuration each M.O.P chassis has common
fixing points which are used to mount drive motors, position
navigation Sensors and fasten payloads into the Rover.
The
Chassis can accommodate on-board processing and power supply via
a chassis mounted RCX. In situations
where power, or additional
data processing is required an umbilical cable can be mounted to
the top of the chassis. All data and power is routed through the
umbilical to the Rover. The umbilical is typically used in situations
where intensive data processing is required (beyond
the RCX’s
capacity) such as image processing
and navigational computation.
There are fastening mounts for collision sensors (touch) on
all four corners of the chassis. Each can be configured to allow
for
various sensor types and configurations.
Drive
Motors mounted at the rear of the chassis (Yellow
Zone) have a common
mounting position which allows for variation within the Drive assembly
(Red Zone) without having to re-position the motors.
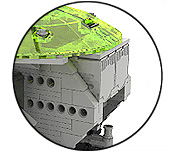
The chassis has many Payload mounting configurations available due
to the large open construction of the front section (Blue
Zone).
All types of sensors can be mounted within this bay depending on
mission and performance requirements
The
M.O.P. Chassis can accommodate on-Board processing (via the
RCX) or remote processing via a tethered umbilical
Both
front and rear Touch sensor mounts are configurable
Front
fixing points allow for a variety of Payload configurations.
Drive
Motors have a common fixing point on all chassis
BrickVista is a completely unofficial, fan created web site
showcasing models created using official parts produced by the LEGO® company.
All trademarks, service marks, and copyrights are property
of their respective owners. LEGO®, Technic, Mindstorms, Robotics Invention
System, and RCX are trademarks of the LEGO® Group of companies, which does not
sponsor, authorize or endorse this site.
Visit the official LEGO® website at http://www.LEGO.com.
All photographic images of Rovers are supplied courtesy of
NASA/JPL, which does not sponsor, authorize or endorse this site. Visit the
official NASA website at http://www.nasa.gov.




 Regardless
of mission specific configuration each M.O.P chassis has common
fixing points which are used to mount drive motors, position
navigation Sensors and fasten payloads into the Rover.
Regardless
of mission specific configuration each M.O.P chassis has common
fixing points which are used to mount drive motors, position
navigation Sensors and fasten payloads into the Rover.