|
YogiCub is a simple Rover, focusing on drive and steering
systems only. It is powered by an on-board LEGO® Mindstorms
RXC 2.0.
The RCX is loaded with programs that take YogiCub through
a series of simple pre-defined driving sequences that test
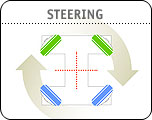
drive and steering capabilities. YogiCub has four independently
powered wheels, which are all capable of pivoting to provide
steering.
Lets learn more about YogiCub!
|