 |
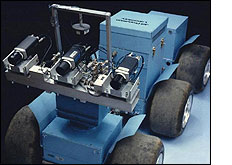
Blue
Rover
The first ‘3-Segment’
Rover. Each segment of the Rover was linked via a universal
umbilical which allowed each segment to remain in contact
with the ground while traveling over rough terrain.
The Blue Rover had twin cameras which enabled its operators
to see a live stereoscopic view of the Rovers surrounding
environment.
Back
|
 |
 |
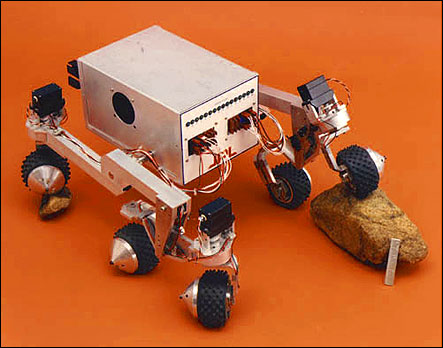
Robbie
A larger version
of the Blue Rovers' 3-Segment design with the inclusion
of a grabbing arm for collecting scientific samples.
Back
|
|
 |
Pantograph
Suspension
The precursor
to ‘rocker-bogie’ suspension used on all Mircorovers.
Back
|
|
 |
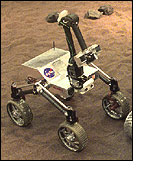
Rocky
1
The Rocky Microrovers
were built to prove the ability of a small rover to
navigate rough terrain and to explore an unknown
environment. Rocky 1 was the first to employ the rocker-bogie
suspension
system developed by Don Bickler (and patented by JPL),
which allows it to safely navigate steps and obstacles
twice the height of its wheels.
Back
|
|
 |
8-Wheeler
Back
|
|
 |
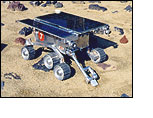
LSR
- Lightweight Serviceable Rover
Back
|
|
 |
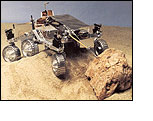
Rocky
3
Rocky 3 improved
on Rocky 1's mobility system and also contained a robotic
arm and sensors. It could navigate autonomously to an
interesting location, moving around obstacles in its
way, and then scoop up a soil sample. It could then
return to its "Lander" by using an infrared
beacon as a homing device.
Back
|
|
 |
Rocky
4
Rocky 4 was a
flight prototype version of Rocky 3: its chassis was
made light and strong enough to withstand launch and
landing. In addition to the sensors carried by Rocky
3, Rocky 4 carried a seismometer and a "rock chipper"
that it could use to remove the weathered rind from
a rock, exposing a fresh rock surface to the rover's
other instruments. A June 1992 test of Rocky 4 proved
the concept of an integrated Microrover system, paving
the way for a rover to be included on the Pathfinder
mission.
Back
|
|
 |
Rocky
3.2
Development of
Rocky 3’s mobility, and control systems. It shares
many common elements developed for the Rocky 4 flight
prototype Rover.
Back
|
|
 |
Rocky
7
Beyond the 1997
Microrover Flight Experiment on the Pathfinder Mission
to Mars , NASA/JPL continued to develop small robotic
rovers for planetary surface exploration. Rocky 7 was
designed to expand the current science enabling capabilities
of Microrovers, while increasing their range of operation.
This work includes exploration of new or improved methods
of mobility, manipulation, sensing, computation, and
control.
Back
|
|
 |
FIDO
The Field Integrated
Design and Operations (FIDO) Rover is JPL's advanced
technology prototype Rover designed to support the NASA/JPL
Mars Exploration Rover (MER) Project. In particular,
the FIDO rover conducts mission relevant field trials
that simulate mission operations scenarios and validate
rover technology in the areas of rover navigation and
control, instrument placement, remote sensing, scientific
data collection, intelligent behaviors, telemetry processing,
data visualization, and mission operations tools.
Back
|
|
 |
Rocky
8
A new and improved
version of Rocky 7
Back
|
|
 |
Rocky
4.2 (MFEX)
The Microrover
Flight Experiment--later named Sojourner--eventually
resulted in the first successful test of a rover on
Mars. Based on the Rocky 4 Microrover, the MFEX design
incorporated as many "off the shelf" parts
as possible to keep costs down.
Back
|
|
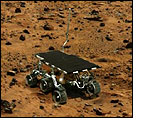 |
Sojourner
The MFEX Rover
is based on the Rocker-Bogie suspension system developed
at JPL in the late 1980's. This six wheeled platform
is the key to the fantastic mobility achieved by the
Rover.The Sojourner rover was successfully deployed
onto Mars from the Pathfinder Lander on July 5, 1997.
Back
|
|
 |
Athena
SDM
The Mars Exploration
Rovers carry what is called an Athena Payload: Scientific
Payload containing instruments and tools for measuring
geographic samples and searching for signs of water
and life on Mars. The Athena Payload, along with the
FIDO Rover are designed to support the Mars Exploration
Rover (MER) project by allowing scientists and engineers
to test scientific tool and instruments on Earth, prior
to the MER’s arriving on Mars.
Back
|
|
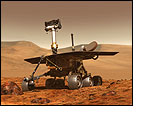 |
MER
- Mars Exploration Rover
The Mars Exploration
Rovers, will launch toward Mars in 2003 in search of
answers about the history of water on Mars. The Design
of the Mars Exploration Rovers builds upon the Sojourner
Rover design with improvements in mobility, control
and functionality.
Back
|
|
 |
GoFor
Concept Rover
Back
|
|
 |
Nano
Rover
The Nanorover
was selected as a technology experiment on what would
be the world's first asteroid sample return mission,
MUSES-C. Only 20 cm long and weighing less than 100
grams, the Nanorover would be able to move about the
surface of an asteroid with almost negligible gravity.
Unfortunately, the rover portion of the MUSES-C mission
was canceled.
Back
|
|
 |
SRR
- Sample Return Rover
The Sample Return
Rover (SRR) is a small autonomous four-wheel Rover that
employs 4-wheel independent drive and steering. A parallel
linkage on the suspension enables simultaneous operation
of articulated shoulder, passive rocker and steering.
It is capable of speeds up to 10cm/sec. The rover is
equipped with a "micro-arm’’ consisting
of 3 degrees-of-freedom with an actuated gripping end-effector.
A forward-looking stereo camera pair (120-degree FOV)
is used for obstacle detection. In addition, there is
a manipulator-mounted goal camera (20-degree FOV) and
manipulator-mounted stereo color pair (45-degree FOV).
Back
|
|
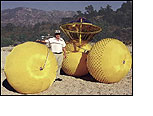 |
Inflatable
Rover
The JPL Inflatable
Rover Program is focused on two types of inflatable
vehicles for transport of instrument payloads on distant
planets and moons. One, referred to as "Big Wheels,"
is a lightweight, motor-controlled vehicle with large
balloon tires, and the other is a large, wind-blown
sphere, referred to as "Tumbleweed." Inflatable
Rovers would be used for robotic outpost development
(transporting other rovers to distant sites); transportation
of astronauts; and long-distance transfer of heavy equipment
or in situ resources, such as water ice from the Martian
North Pole.
Back
|
|