|
Sojourner's wheels and suspension use a rocker-bogie
system that is unique in that it does not use springs.
Rather, its joints rotate and conform to the contour
of the ground, providing the greatest degree of stability
for traversing rocky, uneven surfaces. A six-wheel chassis
was chosen over a four-wheel design because it provided
greater stability and obstacle-crossing capability.
A Six-wheeled vehicle can overcome obstacles three times
larger than those crossable by four-wheeled vehicles.
For example, one side of Sojourner could tip as much
as 45 degrees as it climbed over a rock without tipping
over.
Mechanical System
Mobility configuration and general size are drawn from
the Rocky 4 prototype.
Mobility System
Six wheel rocker bogey with four corner steering. Total
of ten motors (actuators).
Navigation System
Black and white CCD cameras, and five laser stripe projectors
on front side of the Rover. Quartz rate gyro. Accelerometers
(3). Wheel optical encoders. Bump detector switches.
Motor Control System
Bang-Bang on/off control of motor actuation is used
based on motor position monitored by optical encoders.
No variable rate motion is possible.
Mass
11.5 kilograms (24.3 lbs.) on Earth (about 9 lbs. on
Mars).
Size
60 x 40 x 35 centimeters.
Speed
Up to 0.6 meters (1.9 feet) per minute. Sojourners average
daily distance was about 3 meteres, travling no more
than 10 meters away from the Pathfinder Lander.
Sojourner
Home Page
TeleComunications
Systems
Control
& Navigation Systems
Power
& Control Systems
|




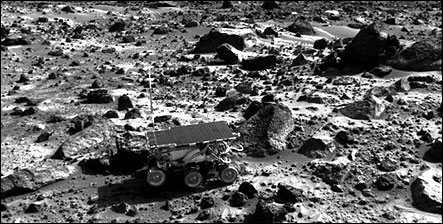
 The
most notable of the Microrovers was Sojourner – the descendant
of Rocky 4, which captured the public’s imagination when
it traveled to Mars aboard the Mars Pathfinder Mission in
1997. Sojourner’s function was to, explore the terrain
of Mars within sight of the Pathfinder Lander, conducting
atmospheric, geographic, and scientific experiments. Sojourner
was about the size of a child's small wagon, had six wheels,
and could move at speeds up to 0.6 meters (1.9 feet) per minute
and travel up to three meters a day. (This isn't very fast
or far, but enough to accomplish many tasks during a day.)
The
most notable of the Microrovers was Sojourner – the descendant
of Rocky 4, which captured the public’s imagination when
it traveled to Mars aboard the Mars Pathfinder Mission in
1997. Sojourner’s function was to, explore the terrain
of Mars within sight of the Pathfinder Lander, conducting
atmospheric, geographic, and scientific experiments. Sojourner
was about the size of a child's small wagon, had six wheels,
and could move at speeds up to 0.6 meters (1.9 feet) per minute
and travel up to three meters a day. (This isn't very fast
or far, but enough to accomplish many tasks during a day.)